
 关注必威betway
关注必威betway

ROBO将与德国慕尼黑工业大学合作,将VSLAM导航技术引入国内,使ROBOGO成为第一个应用该技术的医用无人车。
VSLAM是近年来的技术宠儿。Google最新的VPS逆天黑科技就是利用计算机视觉进行定位,使适用范围(室内、室外)和精度(理论达到厘米级)上都大大超越GPS。Tesla无人车也充分利用了自主研发的视觉处理工具Tesla Vision,对行车环境进行专业的解构分析。
有了VSLAM技术,必威betway可以大胆的说,AGV能够像人类一样,在未知的新环境中可以通过观察环境,理解环境,最终实现与环境的交互协作。

*VSLAM地图构建,图片来源:百度 AI
作为医疗AGV,ROBOGO立志引领行业发展,成为首台搭载VSLAM导航技术的医疗无人车!

近日,德国慕尼黑工业大学的Nassir Navab教授(全球知名的医学影像学、医学图像分析以及人工智能领域权威专家,医学图像计算和计算机辅助干预国际会议(MICCAI)董事会成员,IEEE TMI、MedIA 、Medical Physics等国际期刊编委会成员)来到ROBO,带来了VSLAM的最新研发进展。Nassir Navab教授介绍的语义VSLAM技术,能使ROBOGO实现室内环境3D重建,弥补2D导航的缺陷,并对医院环境进行语义识别,实现有效的避障导航和交互功能。
凡是拥有一定行动能力的智能体都拥有某种形式的SLAM系统。目前常见的SLAM系统一般具有两种形式:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(VSLAM)。相较而言,VSLAM应用场景更为丰富,更能适应较大尺度且动态的环境,生成的地图更为丰富,且传感器的稳定性更高。
VSLAM本身已经是行业领先技术,但是此次Nassir Navab教授带来了更加创新的构想,将VSLAM技术与深度学习融合,利用深度相机获取地图数据,生成三维点云地图,而后将三维点云地图与语义进行关联,结合生成环境的语义地图,在语义地图中区分出静态与动态物体,并可以在语义层面进行更高层次的场景识别,提供未来指令型任务的输入和输出,提高AGV服务能力和人机交互的智能性。有了语义VSLAM,ROBOGO就能轻松识别环境中的手术台、座椅、电梯等等物体,执行任务更加轻松啦!
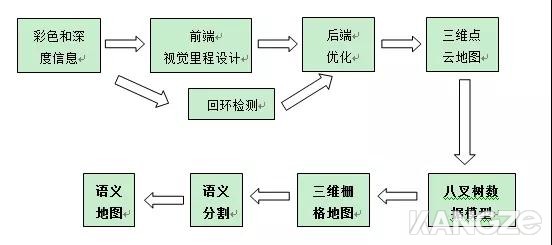
*一张图读懂语义VSLAM
同时,拥有语义VSLAM技术的ROBOGO能轻松实现跨楼层检验样品运输。接受指令后,ROBOGO会自动计算自己的位置与电梯的位置,然后进行路径规划和导航,到达电梯后向电梯发送指令,实现开门、关门,自动到达目标楼层,行动过程中还能自动识别并躲避障碍物!

ROBO积极寻求与全球医疗机器人、人工智能领域的专业科研机构合作,致力于不断提升研发水平,以强大的科研实力为ROBO的长远发展奠定坚实的基础。新时代,新技术!ROBO将继续秉持匠心,深耕技术,不断钻研,走在时代最前沿,用国际顶尖技术打造领先行业的医疗AGV!